Our Terms & Conditions | Our Privacy Policy
In a significant breakthrough in the study of limbless locomotion, an international team of scientists has documented and modelled a previously unrecorded escape movement used by newborn yellow anacondas. Dubbed the ‘S-start’, the motion represents a novel, non-planar locomotion that the snakes employ briefly to flee from perceived threats. The discovery opens new avenues in the study of snake evolution and the design of soft-bodied robots.
During a recent study, researchers from the University of Massachusetts Lowell and Washburn University, USA, observed the undocumented motion in the newborn snakes. Professor Raghunath Chelakkot, Associate Professor at the Indian Institute of Technology (IIT) Bombay, who was part of the research team, said, “Whenever the snakes were handled or approached during the experiments, they consistently employed a non-planar, transient locomotion to move away from the researcher.”

Snake movement is traditionally classified into three main types: straight-line rectilinear crawling, wave-like undulatory motion, and sidewinding, which is commonly observed in desert species. However, not all movements conform to these categories, and it is increasingly evident that the conventional classification does not capture the full range of their adaptable strategies.
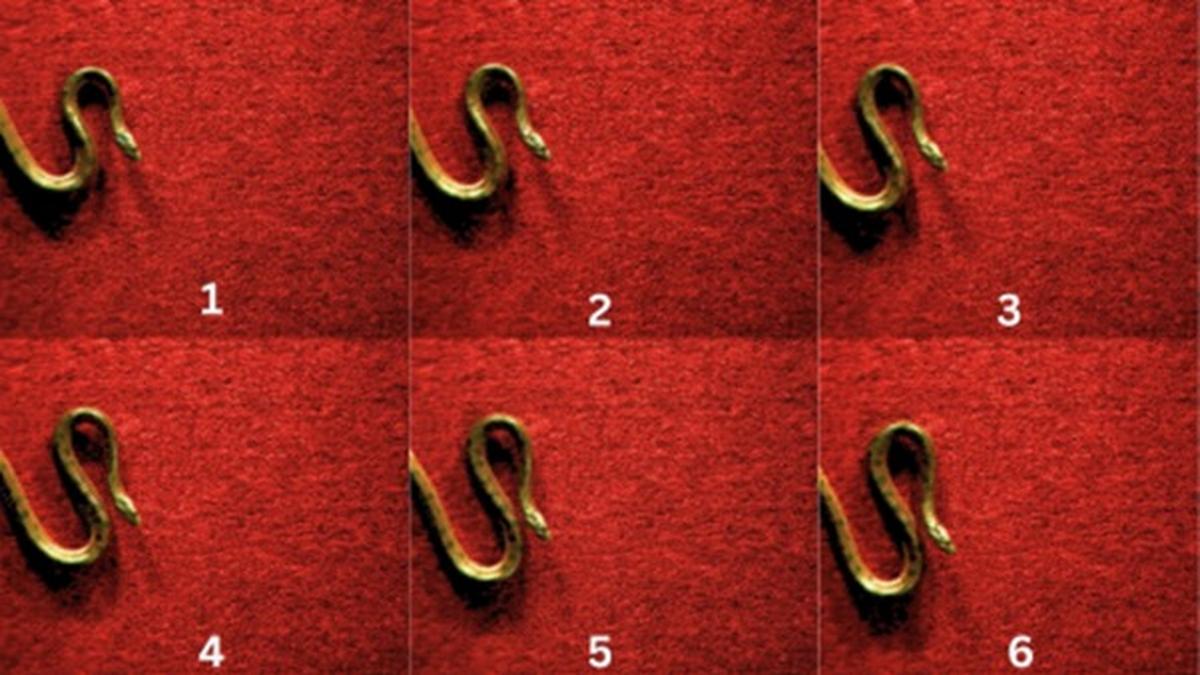
In this case, Mr. Chelakkot said, the snake raises its head slightly and coils itself into an ‘S’ shape. The S-curve then travels down its body, propelling it forward. “We call it an ‘escape gait’ as lifting the body is not energetically optimal for snakes, and this locomotion aims to get away from harm’s way as quickly as possible,” he said
The S-start is a transient motion, meaning it cannot be used continuously. After each movement, the snake must reset the S-shape before repeating the energy-intensive action to reach a safe distance.

A young anaconda curling into the S‑shape and propelling itself away from a threat – perfect for showing progression.
| Photo Credit:
Special Arrangement
To study this motion, a team comprising Prof. L. Mahadevan (Harvard University), Prof. Raghunath Chelakkot (IIT Bombay), Dr. Nicholas Charles (Harvard University), Prof. Mattia Gazzola (University of Illinois at Urbana-Champaign), and Prof. Bruce Young (Kirksville College of Osteopathic Medicine) used computational modelling. They represented the snake’s body as a flexible, active filament, enabling them to simulate the motion and understand the underlying physics.
Mr. Chelakkot noted, “The key challenge in modelling is determining the internal force and torque – essentially the twisting forces – that recreate the snake’s complex posture during locomotion.”
To their surprise, the researchers found that the motion could be replicated using just three localised torque pulses moving in different directions along the body toward the tail. “The initial posture during the S-start motion is complicated since it involves in-plane (on the floor) and out-of-plane (lifted off the floor) bending of the snake’s body. It was a surprise that a relatively simple torque distribution on an elastic filament could reproduce a complicated posture displayed by the snake during locomotion,” he said.
The model also helped determine the weight-to-muscle torque ratio, explaining why the movement is seen only in juvenile yellow anacondas. To perform the motion, a snake must have sufficient muscle strength to lift and twist parts of its body while generating forward thrust. Juveniles, being lighter and more muscular, have the ideal balance for this locomotion. The team used the model to generate a phase space – a map of conditions such as weight and muscle force that permit the S-start to occur.
Interestingly, when the S-start was repeated in a continuous cycle, it evolved into sidewinding, a movement typically seen in desert-dwelling snakes like the sidewinder rattlesnake and horned viper. This smooth transition suggests a possible evolutionary link between the two.
“The structural similarities between S-start and sidewinding indeed hint at such a possibility. A more recent report on the lasso motion in tree-climbing snakes also appears to show a variant of S-start motion. However, further studies need to be done in this direction to make any concrete claims on a common evolutionary pathway,” Mr. Chelakkot said.

By identifying and modelling the S-start, researchers are helping bridge gaps in the classification of snake locomotion. The study also underscores the significance of transient movements – brief, rapid motions like escape lunges – that are crucial to survival. The findings could serve as a foundation for designing next-generation robots capable of complex, three-dimensional movement.
Mr. Chelakkot added that his team is already exploring such applications. “One interesting direction will be extending the elastic filament framework to other types of limbless locomotion and addressing the diversity displayed by the large class of limbless species, such as snakes, worms, etc. The long-term goal is to make precise quantitative predictions using elastic theory, allowing numerical models to be used for synthesising limbless robots,” he said.
Published – July 20, 2025 04:34 pm IST
Images are for reference only.Images and contents gathered automatic from google or 3rd party sources.All rights on the images and contents are with their legal original owners.
Aggregated From –
Comments are closed.